Der SPI-Bus besteht aus mindestens 4 Leitungen (beim SPI-Simulyzer max. 7 Leitungen):
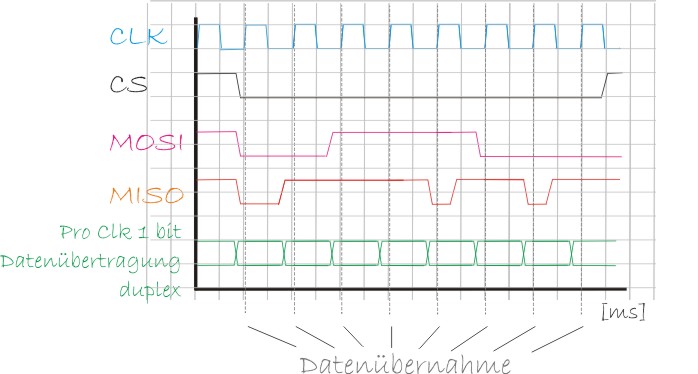
Nachdem die CS-Leitung den entsprechenden Sensor selektiert hat, werden im Clock-Takt die Daten, bit für bit vom Master und dem Sensorsignal auf den Bus gesendet.
.
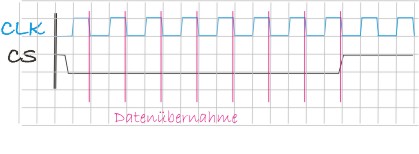
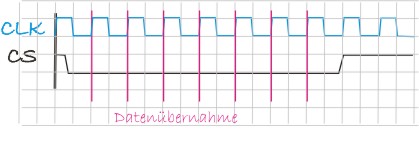
Beispiel einer SPI-Bus Kommunikation mit einem CS:
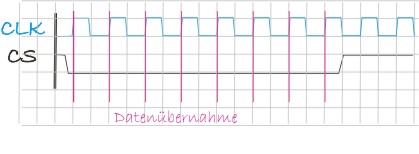
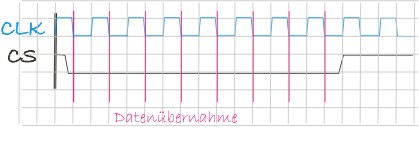
Folgende Varianten der Einstellungen für das Clk-Signal ergeben damit 4 BUS-Betriebsarten:
| CLK-Phase | CLK-Polarität | Einstellungen Simulyzer | ||
| Datenübernahme bei steigender Flanke | Idle (Ruhe) =0 |  |
||
 |
||||
| Datenübernahme bei steigender Flanke | Idle (Ruhe) =1 | 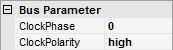 |
||
 |
||||
| Datenübernahme bei fallender Flanke | Idle
(Ruhe) =0
|
 |
||
 |
||||
| Datenübernahme bei fallender Flanke | Idle
(Ruhe) =1
|
 |
||
 |
||||
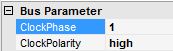
Folgende Parameter sind zur weiteren Charakterisierung des SPI-Busses erforderlich:

Die Parameter sind mit vordefinierten Werten gefüllt, das heißt eine Einstellung ist nur dann erforderlich, wenn die gewünschten Werte von den vordefinierten Werten abweichen.