Vorwärts-Kommunikation (ECU-Sensor):
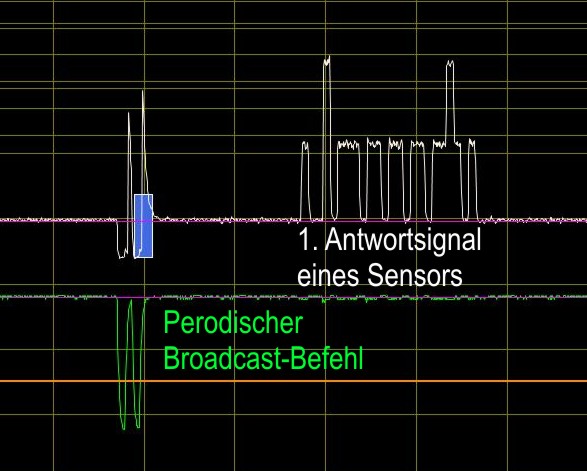
Die ECU sendet einen periodischen Broadcast-Befehl (0)
an alle Sensoren.
Die Zeit zwischen 2 Broadcast-Befehlen hängt von der Anzahl und Länge der definierten Timeslots ab und muss entsprechend definiert werden.
Bei zusätzlicher Verwendung des BDM-Modes werden die BDM-Befehle unmittelbar an den Broadcast-Befehl im reservierten BDM-Bereich angehängt.