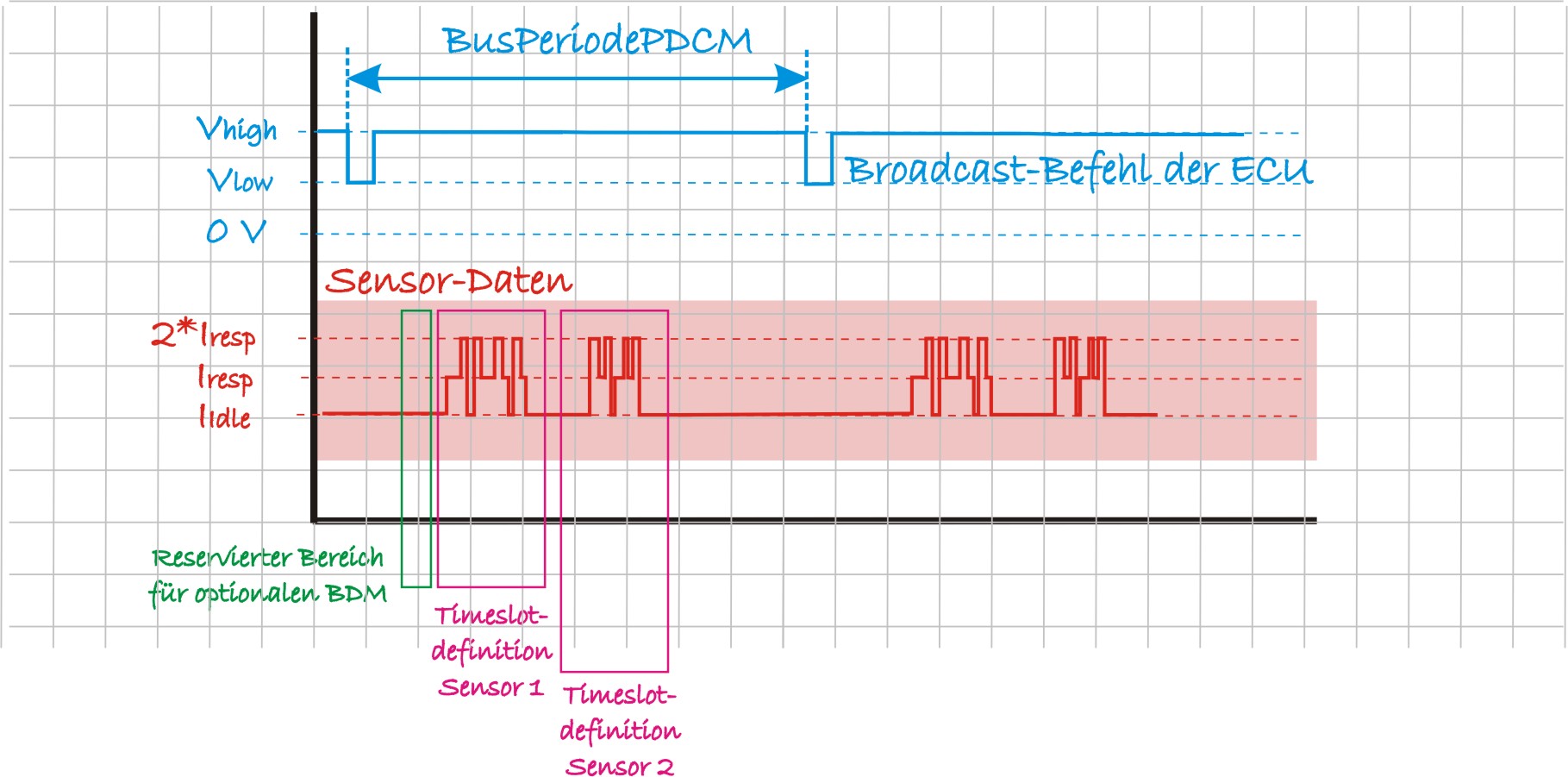
Der Background Diagnostic Mode bietet die Möglichkeit einer seriellen Datenübertragung parallel zum Messzyklus (PDCM). Die Übertragung findet in einem reservierten Datenbereich getrennt für ECU und Sensor zu Beginn eines Messzyklusses statt. Die Datenübertragungsrate ist dabei um die Bandbreite des reservierten Datenbereichs eingeschränkt.
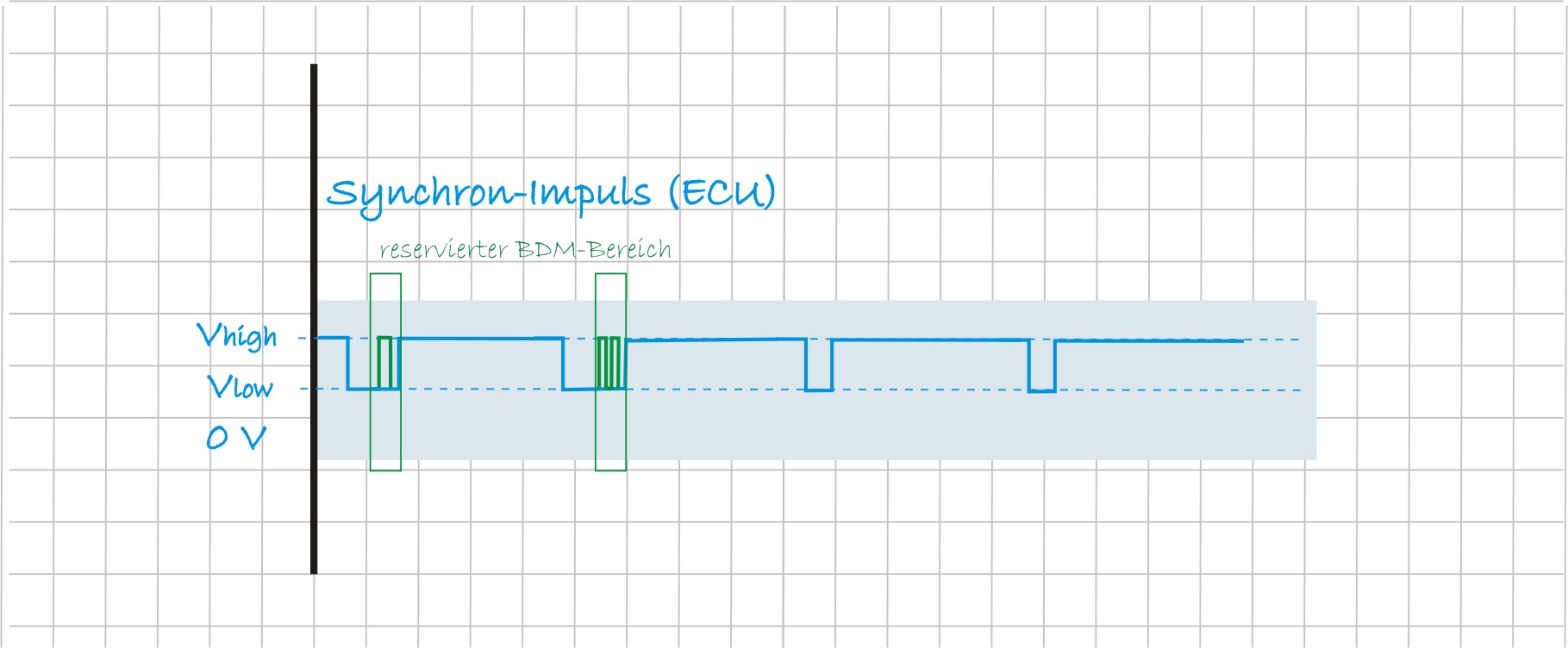
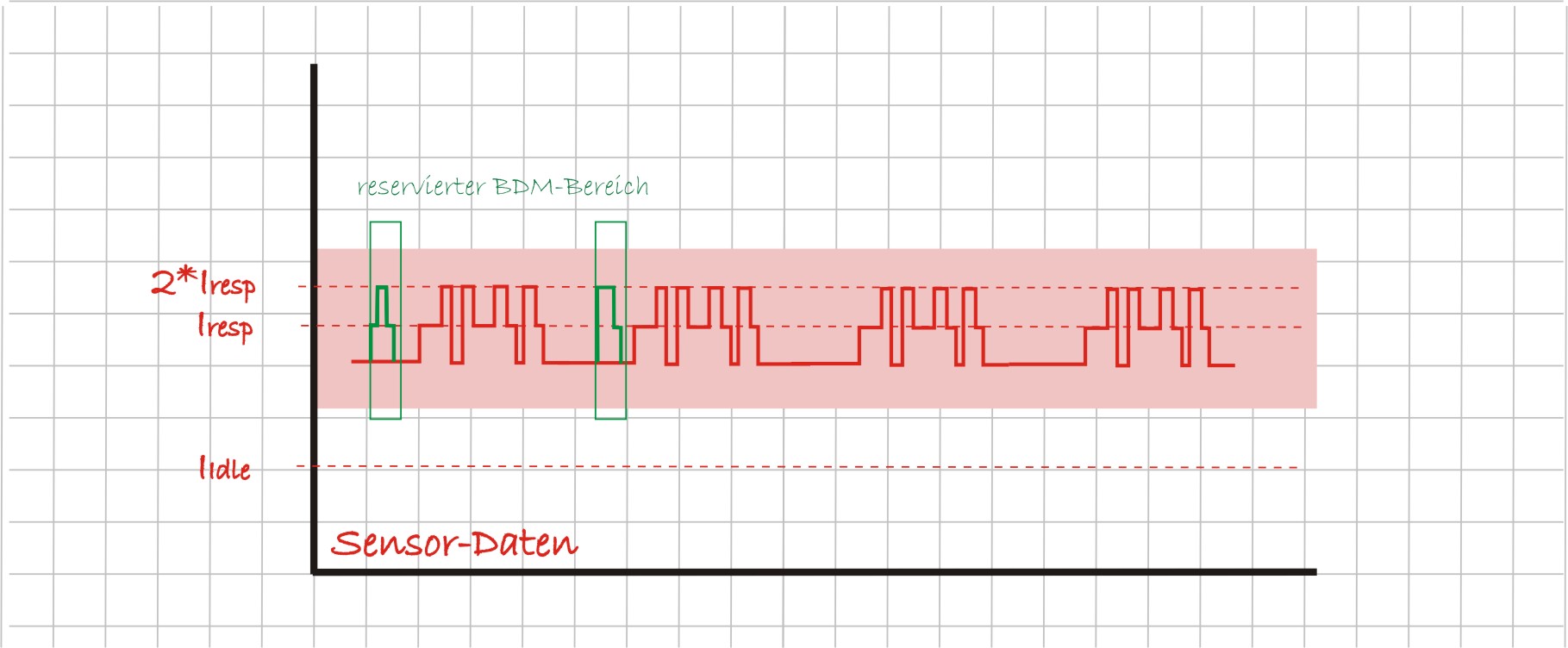
Dabei werden bei der Vorwärts- (ECU-Sensor) wie auch bei der Rückwärtskommunikation (Sensor-ECU) die Datenpakete aufgesplittet und aufeinanderfolgend übertragen.
Das heißt die ECU sendet zuerst den Befehl gesplittet in
2 Bit-Paketen vor dem Broadcast-Befehl des PDCM-Modes.
Danach sendet der angesprochene Sensor sein gesplittetes Datenpaket jeweils im reservierten Bereich vor dem definierten Timeslot (1 Nibble pro Zyklus = 4 bit Dateninformation siehe PDCM-Mode).
Je nach Länge des Befehls- und des Antwortpaketes dauert die Übertragung der Information ein entsprechendes Vielfaches der normalen Datenübertragung.