Die Kommunikation von ECU zu den Sensoren erfolgt durch Modulation der Versorgungsspannung.
In allen synchronen Betriebsarten wird ein Synchron-Impuls erzeugt.
Dabei stehen zwei verschiedene Erzeugungsarten zur Verfügung:
Tooth-Gap-Methode:
Eine logische "1" des Synchron-Impulses wird durch ein Spannungsimpuls repräsentiert.
Eine logische "0" des Snchron-Impulses durch das Fehlen des Spannungsimpulses.
Diese Methode kann nur bei festen Synchron-Impuls-Zeit angewandt werden.
Diese Methode kann bei den Datenformaten 1 (Short), 2 (Long 4 und 8-Bit Datenwort) und 3 (XLong) angewandt werden.
Pulsweiten-Methode:
Eine logische "1" wird durch einen langen Synchronimpuls repräsentiert.
Eine logischen "0" durch einen kurzen Synchronimpuls.
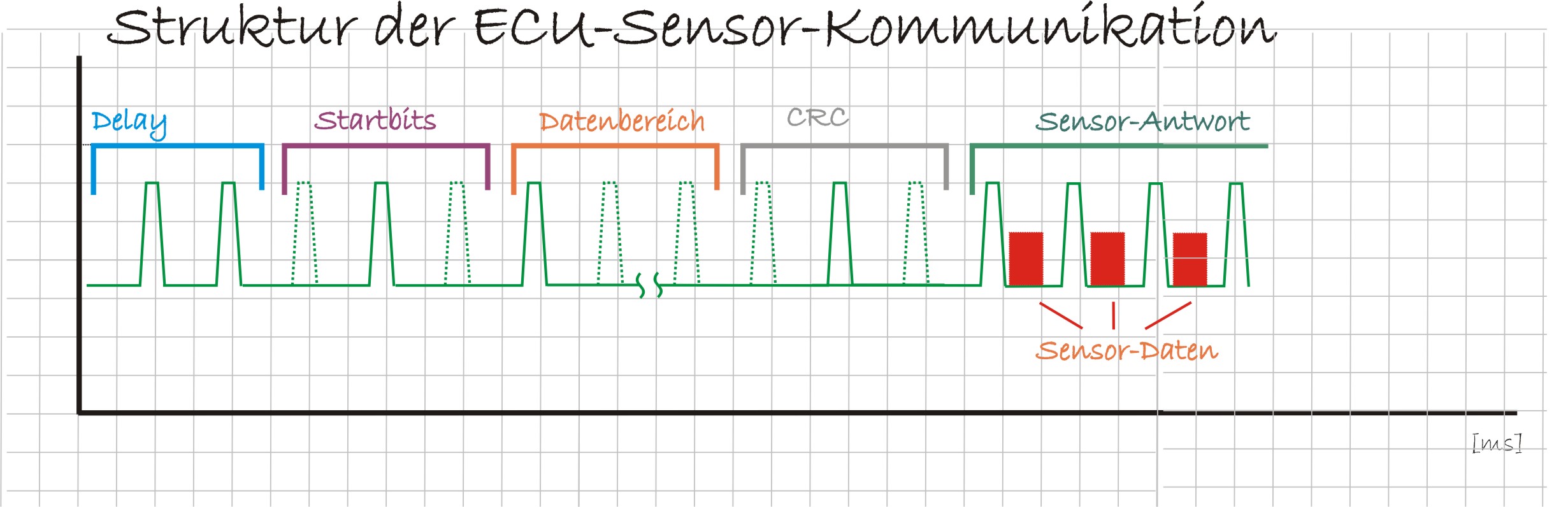
Das Datenformat besteht aus folgenden Bereichen:
Startbedingungen
Startbits
Datenfeld
Fehlerdetektierung
Sendephase der Sensoren nach Synchronisationsimpuls.
Diese Methode kann bei allen Datenformaten 1 (Short), 2 (Long 4 und 8-Bit Datenwort), 3 (XLong) und 4 (XXLong) angewandt werden.
Der Datenbereich (Frame) und die Formate teilen sich wie folgt auf:
Die Länge des Datenformats wird definiert über den Inhalt Sensor Adresse und der Function Codes.
Laut PSI5-Spezifikation ergeben sich für die unterschiedlichen Formate folgende Bit-Längen:
Format 1 - Short -
15+2 Bit
Dieses Datenformat kann mit der Pulsweiten- und der Tooth-Gap-Methode verwendet werden.
Format 2 - Long-
29+3 Bit
Dieses Datenformat kann mit der Pulsweiten- und der Tooth-Gap-Methode verwendet werden.
Format 3 - XLong-
37+3 Bit
Dieses Datenformat kann mit der Pulsweiten- und der Tooth-Gap-Methode verwendet werden.
Format 4 - XXLong-
43 Bit

Dieses Datenformat kann nur mit der Pulsweiten-Methode verwendet werden.
Eine detaillierte Beschreibung der Formate finden Sie in der PSI-5-Spezifikation.